CS452 F23 Lecture Notes
Lecture 13 - 26 Oct 2023
1. Train Control System
1.1. Starting Point
- For A0, dedicated control loop for simple interactive control
- hard to generalize
- jobs need to be split into small (single iteration) pieces
- need to keep track of many jobs-in-progress in the main loop
- hard to generalize
- May have generalized this for K4 by moving jobs into OS-implemented tasks
1.2. Task Patterns
1.2.1. Server
- Receives work requests, sends Replys
- blocks only when there are no requests
- may offload large/slow requests to another task (e.g, worker)
1.2.2. Notifier
- Awaits events, sends notification (e.g, to a server)
- blocks on AwaitEvent
1.2.3. Worker
- Sends request for work (e.g, to server), waits for reply with work assignment
- performs work, which might or might not involve blocking
- Sends result (e.g, to requesting server), waits for reply with new work assignment
- Stays blocked on Reply, unless there is work to do
1.3. Exercise: Control System for TC1
- imagine design at task level
- task responsibilities
- task pattern
- call graph
1.4. Task Examples:
- SensorReader (notifier)
- waits for incoming data on UART3, sends the data
- implementation involves some combination of
- reading data from UART
- polling or awaiting RX interrupt from UART
- CommandWriter (worker)
- request is command to be issued, response acknowledges issue
- implementation involves some combination of
- writing commands to UART
- awaiting CTS interrupts
- Alarm (notifier)
- sends periodic messages to indicate passage of time
- implementation is Send to Clock Server, or directly Await timer interrupts
- TrackMonitor (server)
- receives requests to perform track/train commands, and requests to wait for sensor events
- issues commands or polling requests workers
- enforces half-duplex and one-command at a time
- perhaps tracks sensor triggers
- TrainDriver (worker)
- request is to execute a “train plan”
- for TC1, maybe series of switch commands, train start command, and series of expected sensors/times, train stop command
- sends commands, sensor requests to TrackMonitor
- can abort plan early in case of unexpected behavior, reports plan result
- request is to execute a “train plan”
- Shell
- blocks on input from CONSOLE
- offloads work to planner, TrainDriver
- Planner (worker)
- request is objective, result is a plan
2. System Analyses
2.1. Latency Analysis
- how long is some operation expected to take?
- try to establish bounds - best case, worst case
- start with smaller, more localized analyses, and build up from those
- start with highest priority work
2.1.1. Example: Command Execution Latency
- from Sending the CommandWriter a request to receiving the reply
- assume CommandWriter is highest priority server
- latency includes
- SRR for request (includes a CS)
- request write
- Await interrupt (for CTS) - interrupt handle and another CS (unblock)
- variability:
- we can assume CommandWriter runs immediately after interrupt, because it is highest priority
- otherwise, we need to consider additional delay due to higher priority task(s)
- interrupts might occur while CommandWriter is running?
- can try to estimate/bound number
- this is why we want interrupt handling to be fast and predictable!
- we can assume CommandWriter runs immediately after interrupt, because it is highest priority
- might need to measure primitive steps
- have already measured SRR, including CS
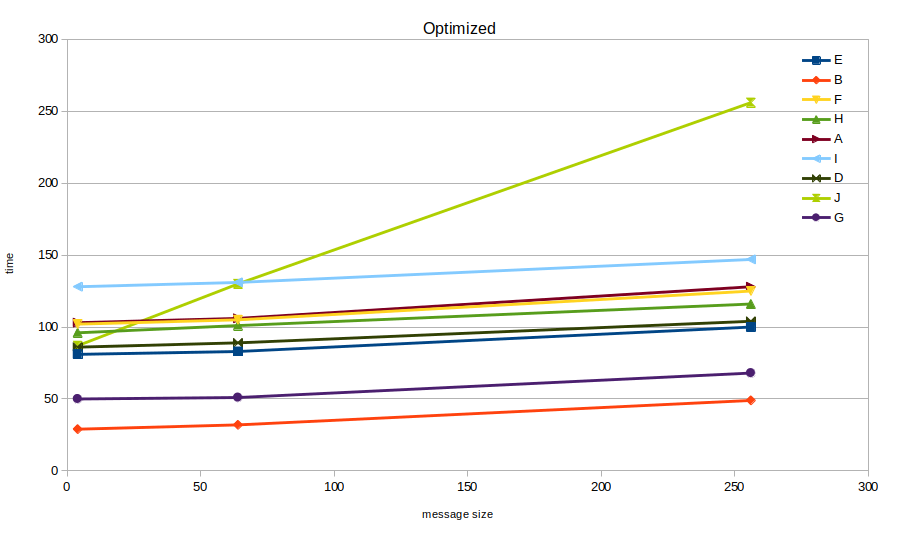
- see unoptimized measurements and optimized measurements from K2 assignment
- easy to measure command writing time, by polling/being interrupted by CTS
- measure interrupt overhead?
- in the kernel, using always-asserted interrupt, count and measure N occurrences
- have already measured SRR, including CS
{kind=link}
{kind=link}
2.1.2. Example: Sensor Poll
- TrackMonitor sends poll command to CommandWriter, then waits for data from SensorReader, records result in memory
- we’ve already estimated time for command execution
- after command executes, Monitor needs to wait for data message from Sensor Driver
- need to estimate time for sensor driver
- in addition, when sensor message arrives at TrackMonitor:
- TrackMonitor might be busy handling another request
- Additional request messages might be waiting ahead of sensor report
- even when data message is available, TrackMonitor may not be running, depending on priorty
- Strategy:
- try to estimate best- and worst- case times, using application knowledge
- e.g., at most one message from CommandDriver, at most one from TrainDriver
- what higher-priority tasks could be runnable?
- utilization of high-priority tasks can be useful for this!
- try to estimate best- and worst- case times, using application knowledge